B2 Robot Tutorial
The provided tutorial will assist you with setting up and operating your B2 quadruped robot. The tutorial topics are listed in the left column and presented in the suggested reading order.

The Unitree B2 is an innovative quadruped robot designed for exceptional agility, adaptability, and durability. Developed by Unitree Robotics, the B2 features advanced sensors, powerful computing capabilities, and a robust modular design, making it well-suited for diverse applications such as industrial inspection, search and rescue, surveillance, and academic research. Whether maneuvering through challenging environments or executing complex tasks, the B2 integrates state-of-the-art technology with outstanding functionality, redefining the standards of modern robotics.
Joint Mobility
The Unitree B2 features advanced joint mobility, powered by high-torque actuators that enable precise and dynamic movement. Each joint is designed with high power density and precision control, allowing the robot to execute agile and stable locomotion across various terrains.The B2’s joint actuators incorporate advanced force feedback and torque control, enabling smooth transitions between walking, running, and climbing. This adaptive mobility ensures the robot can navigate uneven surfaces, obstacles, and slopes** while maintaining stability. Additionally, the high-speed joint response enhances real-time adjustments, making it capable of rapid motion changes for industrial and research applications. With modular and reinforced joint structures, the B2’s leg mobility supports both flexibility and durability, ensuring long-term reliability even under high-load conditions. This makes it well-suited for autonomous exploration, logistics, and industrial inspection tasks where high mobility is crucial.
AI-Driven Learning and Adaptation
The Unitree B2 uses AI-driven learning to enhance autonomy and efficiency. Equipped with deep learning and reinforcement learning, it continuously improves navigation, obstacle avoidance, and locomotion across complex terrains.Its sensor fusion system, combining depth cameras, LiDAR, and IMUs, enables real-time SLAM and intelligent decision-making. The B2 adapts its gait using reinforcement learning, optimizing stability and agility on various surfaces.With gesture recognition and human-robot collaboration, the B2 enhances industrial and security applications. Cloud-based learning further refines performance, making it a versatile and intelligent quadruped for advanced automation and research.
Technical Specifications
Body and Dimensions |
|
|---|---|
Weight: 60 kg (Incliding Battery) |
|
Standing Height: 645 mm |
|
Folded Height: 758 mm |
|
Total Degrees of Freedom: Up to 12 |
|
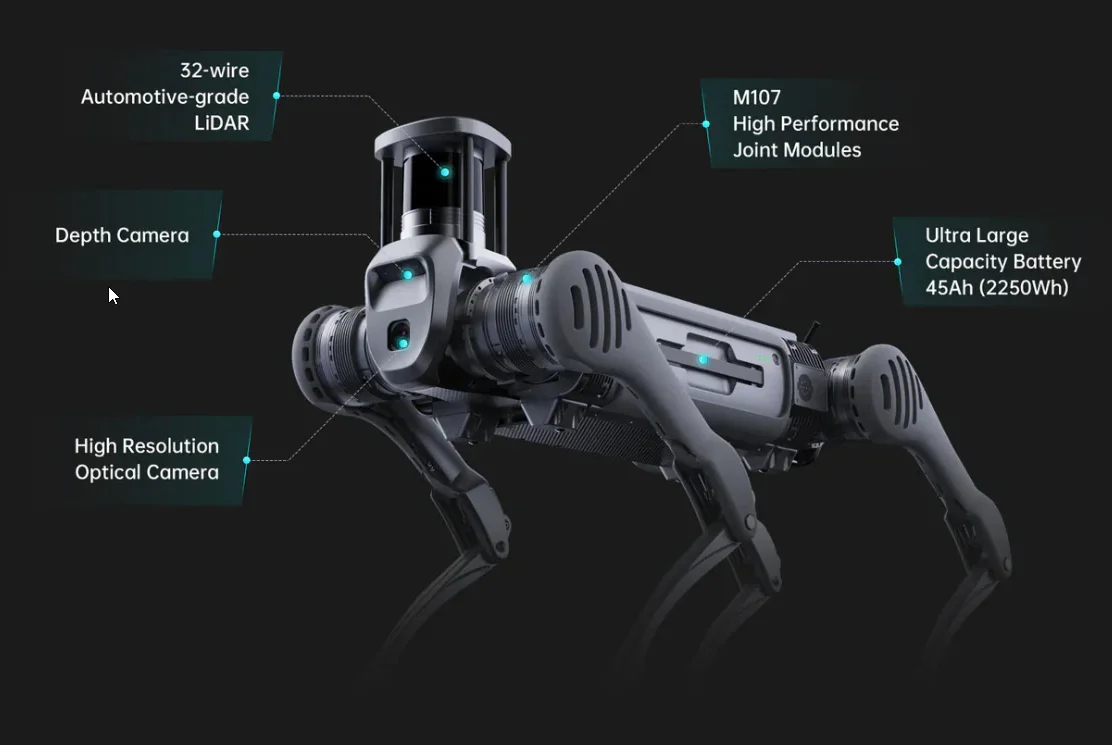
Perception and Sensing |
||
|---|---|---|
360° Detection: Equipped with 3D LIDAR and depth camera. |
|
|
Cameras: Intel RealSense D435i for depth sensing. |
||
Cameras: Optical Cameras |
||
LIDAR: RS-Helioshelios 5515 for precise mapping. |
||
Mobility and Power |
|
|---|---|
Movement Speed: Up to 5m/s |

|
Battery Life: Approx. 3 hours 20 minutes with a 13-string lithium battery. |
|
Battery Weight: 12.2kg |
|
Battery Capacity: 45Ah (2268Wh) |
|
Quick Release Battery: Long-lasting power and easy replacement. |
|
Model Variants

B2: Standard model with 12 degrees of freedom and normal foot.
B2-W: The wheeled model features specialized wheeled feet, combining speed, adaptability, and cutting-edge design. Engineered to navigate various terrains and tackle complex tasks with ease, it pushes the boundaries of robotic mobility, offering enhanced efficiency and versatility in motion.
Model |
B2 |
B2-W |
|---|---|---|
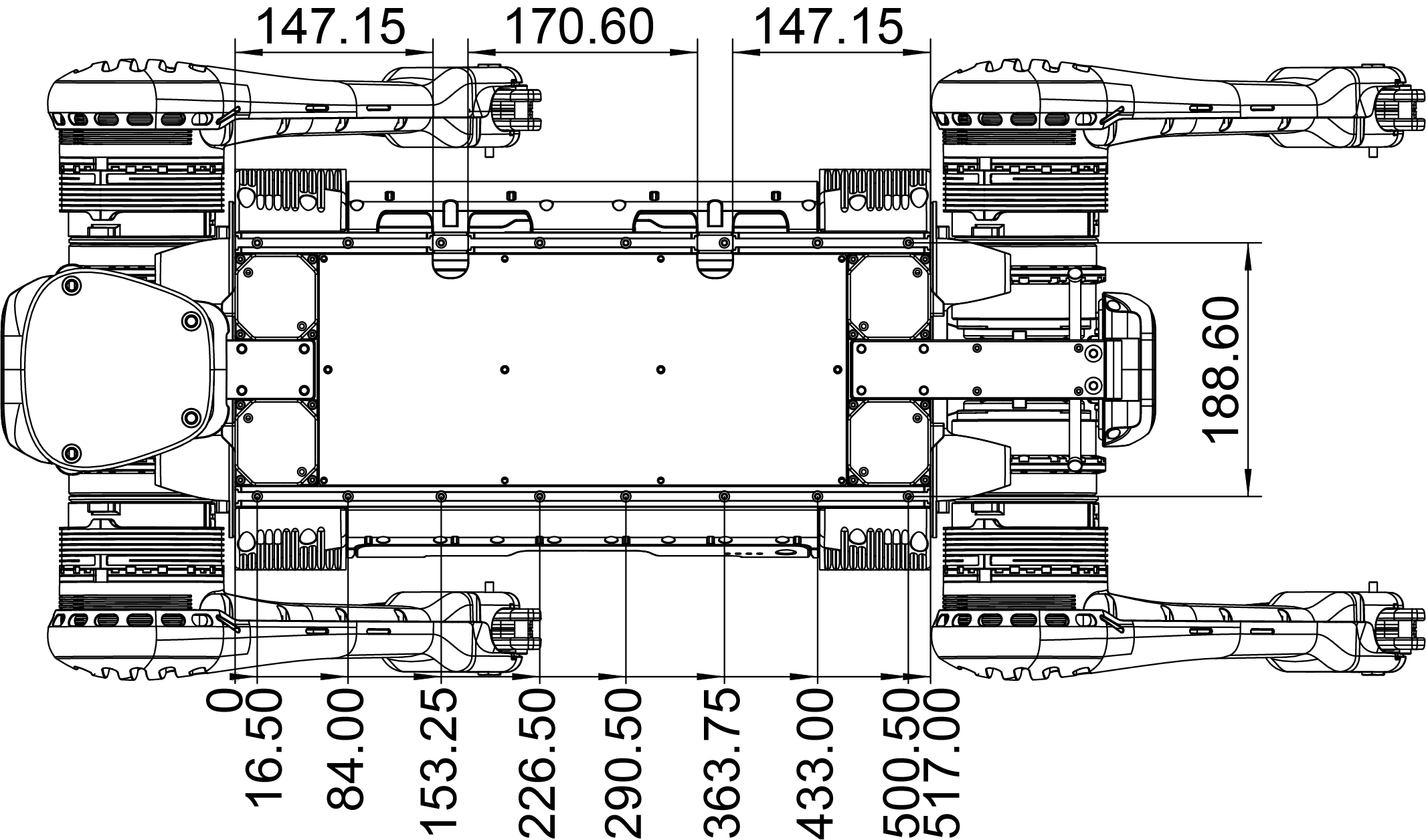
Mechanical Dimensions |
||
Height, Width and Thickness (Stand) |
1098mm×450mm×645mm |
1098mm×550mm×758mm |
Height, Width and Thickness (Fold) |
880mm×460mm×330mm |
950mm×550mm×450mm |
Weight (With Battery) |
About 60kg |
About 85kg |
Total Degrees of Freedom (Joint Freedom) |
12 |
12 |
Single Leg Degrees of Freedom |
3 |
3 |
Maximum Torque of Knee Joint |
360N.m |
360N.m |
Maximum Standing Load |
About 40Kg |
About 40kg |
Continuous Walking Load |
About 120Kg |
About 120kg |
Joint Movement Space
|
-0.87~0.87° -0.94~4.69° -2.82~ -0.43° |
-0.87~0.87° -0.94~4.69° -2.82~ -0.43° |
Electrical Characteristics |
||
Full Joint Hollow Electrical Routing |
YES |
YES |
Joint Encoder |
Dual encoder |
Dual encoder |
Cooling System |
Local air cooling |
Local air cooling |
Power Supply |
13 string lithium battery |
13 string lithium battery |
Basic Computing Power |
Intel Core i5 (platform function) and Intel Core i7 (user development) CPU |
Intel Core i5 (platform function) and Intel Core i7 (user development) CPU |
Sensing Sensor |
Depth Camera+ Optical camera+ 3D LiDAR |
Depth Camera+ Optical camera+ 3D LiDAR |
WiFi 6, Bluetooth 5.2 |
YES |
YES |
Accessories |
||
High Computing Power Module |
NVIDIA Jetson Orin NX (optional) |
NVIDIA Jetson Orin NX (optional) |
Smart Battery (Quick Release) |
45Ah |
45Ah |
Charger |
58.8V 10A |
58V 10A |
Manual Controller |
YES |
YES |
Enviroment |
||
Operating Temperature | -20℃~55℃ |
-20℃~55℃ |
|
Climbing Angle |
> 45° |
> 45° |
Maximum Step Height |
20~25cm |
20~25cm |
Maximum Jumping Distance |
> 1.6m |
|
IP67 Protection |
YES |
YES |
Others |
||
Battery Life |
About 4~6h | About 4~6h |
|
Upgraded Intelligent OTA |
YES |
YES |
Secondary Development |
YES |
YES |
Maximum speed |
> 6m/s |
50rad/s |
Important
The listed parameters may vary based on configuration and usage scenarios. Please refer to actual operating conditions for precise specifications.
The quadruped robot features a complex structure and advanced capabilities. Users should maintain a safe distance and operate it with caution.
In case of any modifications to the product’s appearance, the actual product should be considered as the reference.
Some features mentioned on this page are still under development and testing. They will be released to users in future updates.
This product is designed for civilian use only. Users must avoid making hazardous modifications or utilizing the robot in unsafe ways.
For further details on terms, policies, and compliance with local laws and regulations, please visit the Unitree Robotics website.