QRE DOCS
Mobile Manipulation Platform Ridgeback UR5e
The reader acknowledges and agrees that any information or materials provided by QUARUPED ROBOTICS GmbH are for R&D purposes only. Any kind of services are provided "AS IS" and without any representation or warranty of any kind, express or implied, including but not limited to any warranty of merchantability, fitness for a particular purpose, non-infringement, or any other warranty. QUARUPED ROBOTICS GmbH shall not be liable for any damages, including but not limited to direct, indirect, special, incidental, or consequential damages, arising out of or in connection with the use or inability to use the information or materials provided. This limitation on liability shall apply regardless of the form of action, whether in contract, tort, or otherwise.
Explore Our Robots
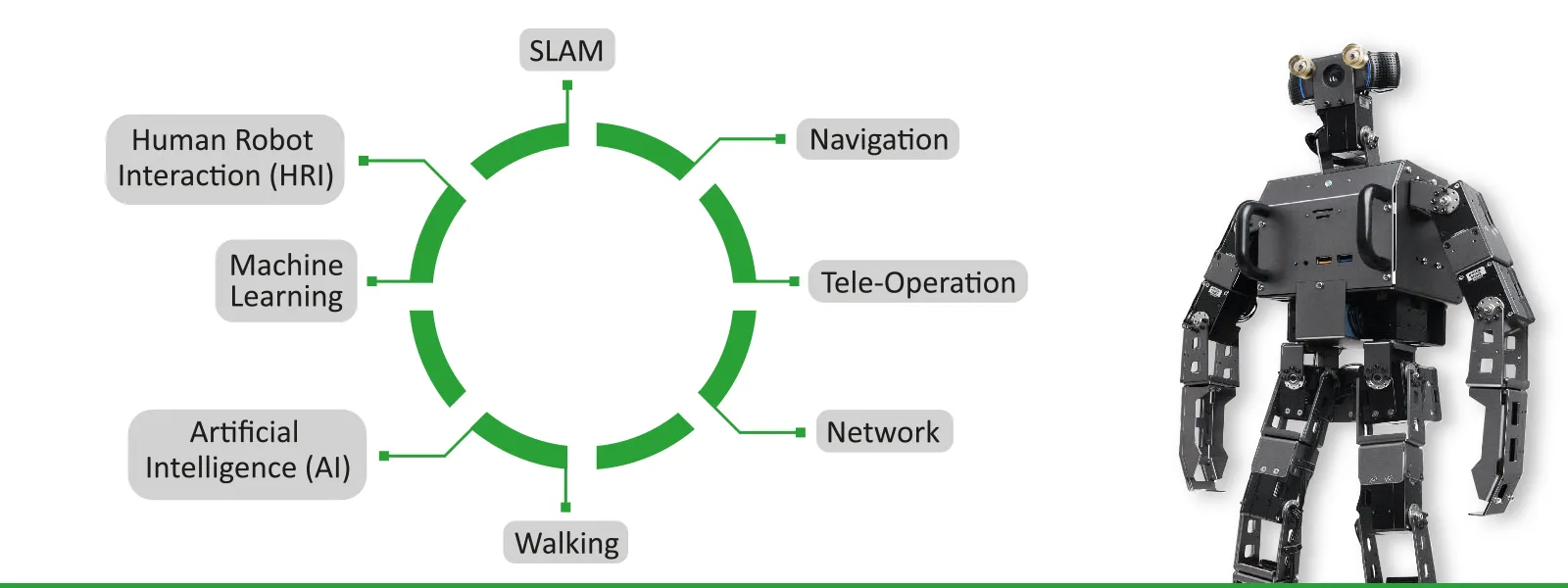
Humanoid Robots


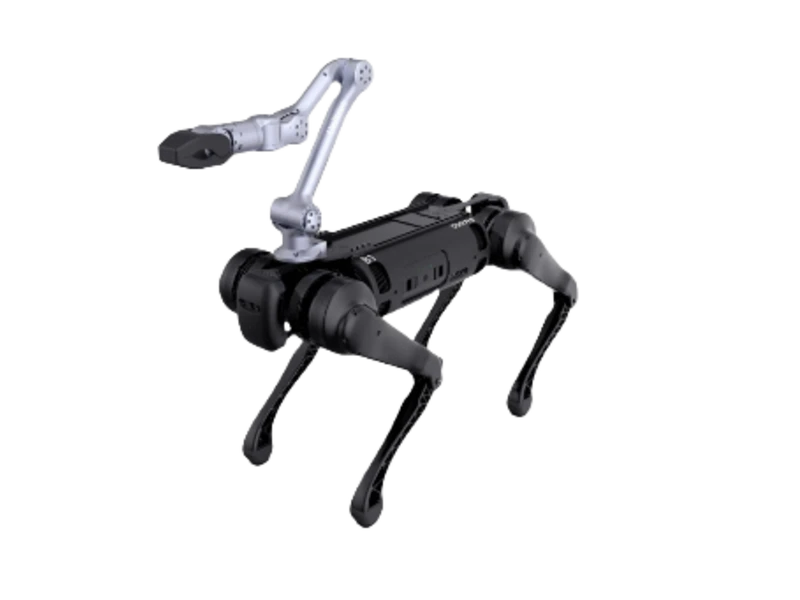
Quadruped Robots



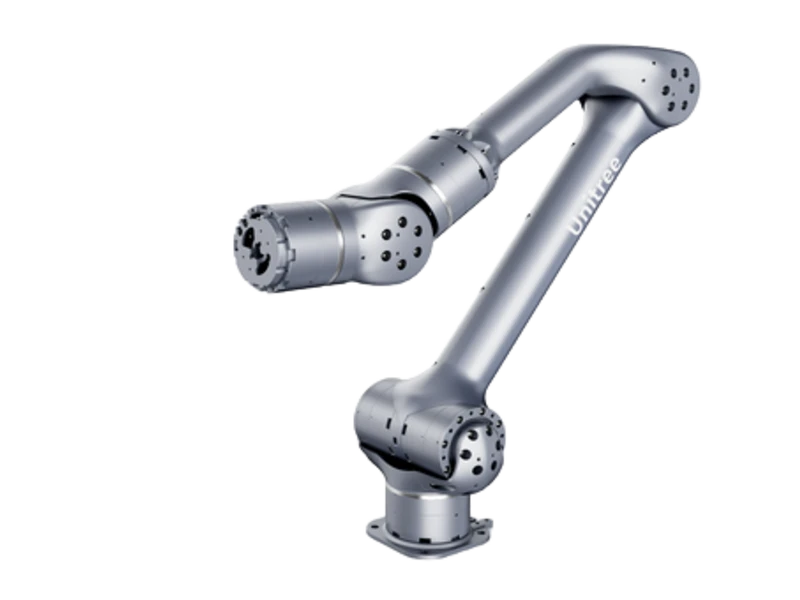
Robotic Arms & Manipulation