H1 Robot Tutorial¶

The provided tutorial will assist you with setting up and operating your H1 bi-pedal robot. The tutorial topics are listed in the left column and presented in the suggested reading order.
Warm Tips for Unitree Humanoid Robot Development and Usage¶
To align with the public’s preference for natural human-like movements, it’s important to adhere to these guidelines, particularly when filming humanoid robots:
Strive for upright or nearly upright knee joint positions when developing leg movement programs.
Reduce step frequency and minimize stationary stepping.
Keep the feet slightly close together during walking to maintain natural movement.
These tips are intended to enhance the authenticity of humanoid robot movements, especially in video documentation.
Component Overview¶
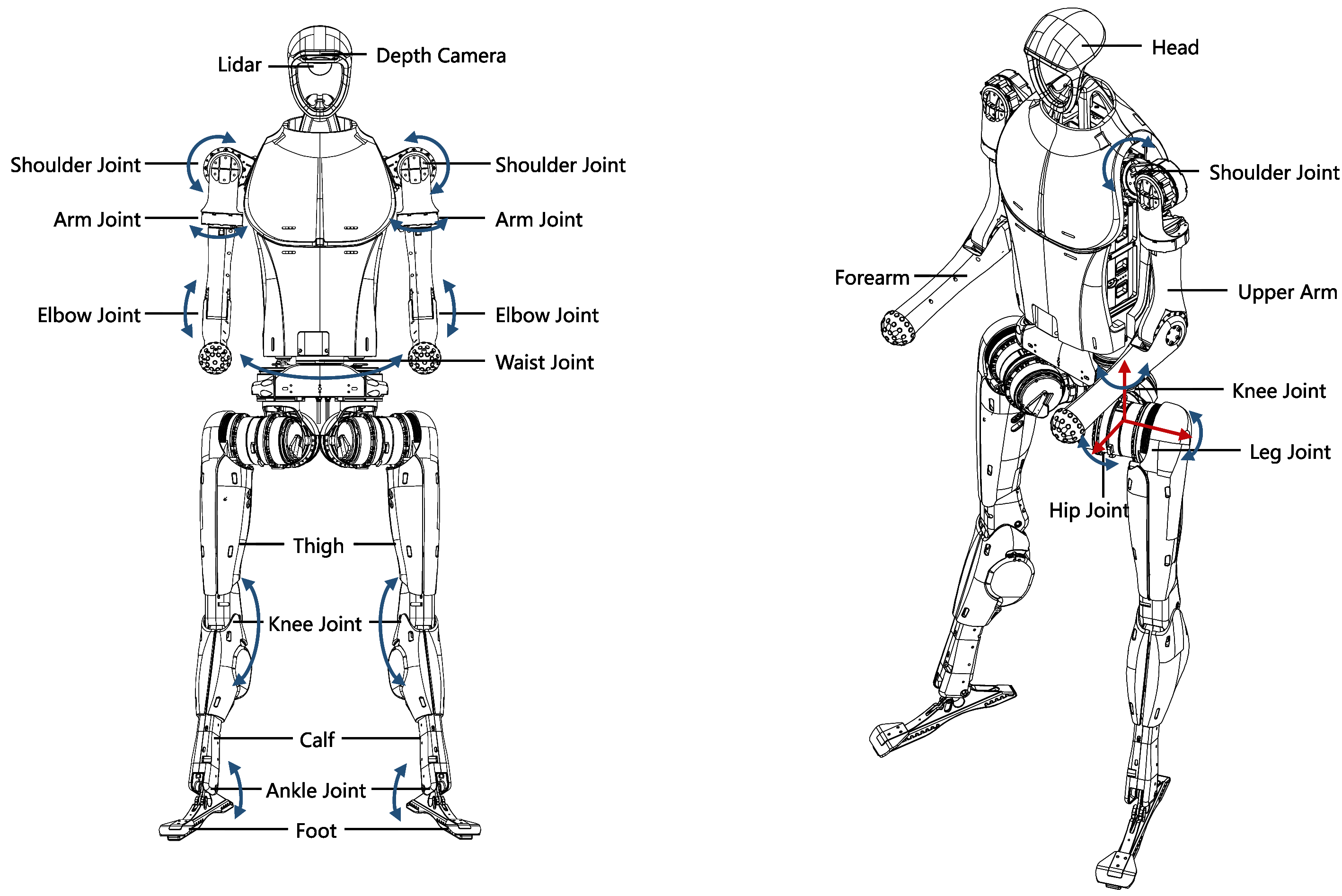
The H1 robot comprises upper and lower bodies, each featuring multiple degrees of freedom. The single arm includes joints for body-shoulder, shoulder, upper arm, and elbow movements, while the single leg features joints for hip, leg, knee, and ankle motions. Additionally, the waist section offers a waist joint. In total, the robot boasts 19 degrees of freedom, enabling precise motion and posture control through 19 joint motors.
Electrical Interfaces¶
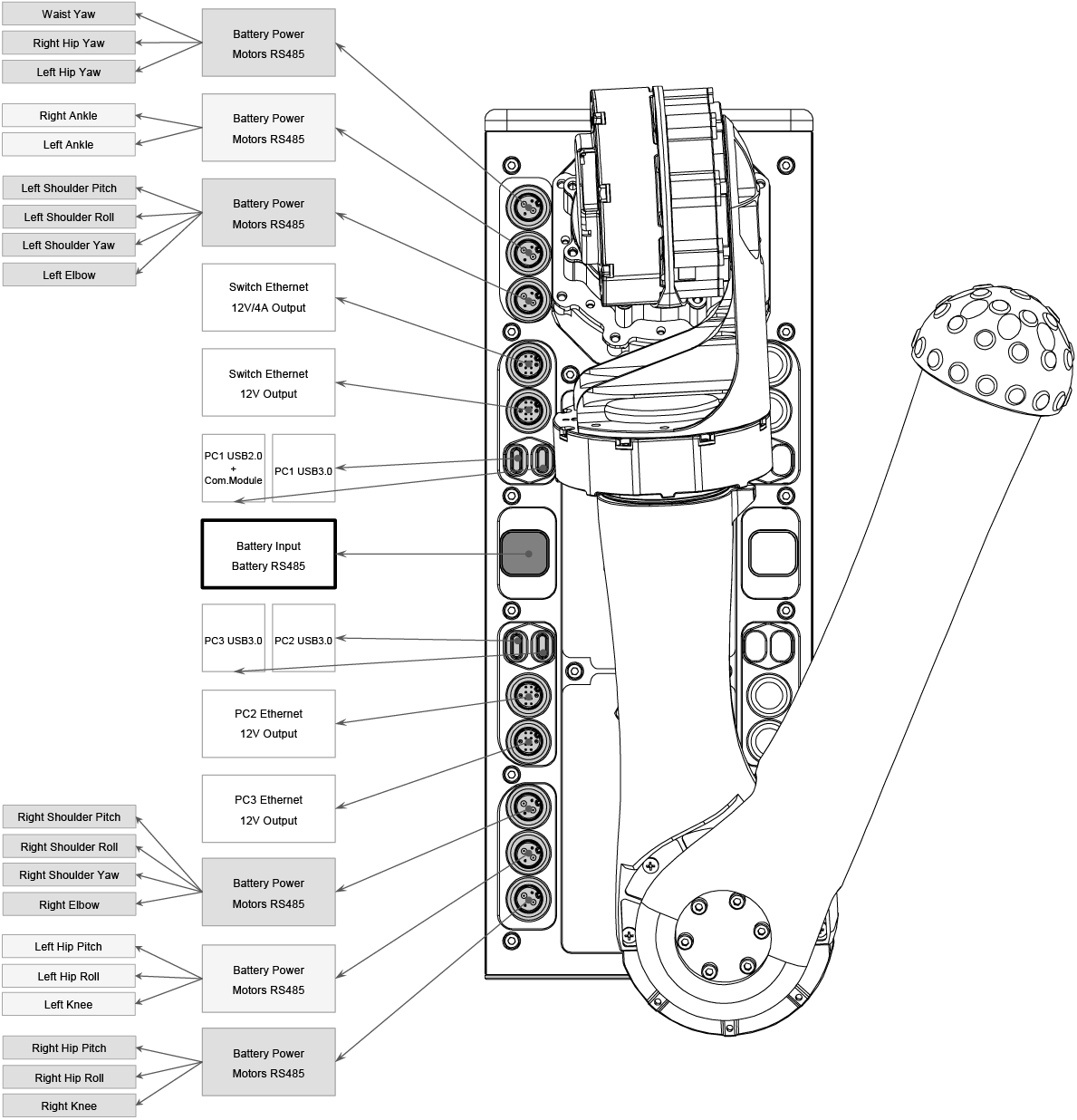
Located on the right side of the H1 robot, the electrical interfaces facilitate connections to various components such as body joint motors, sensor peripherals, and Ethernet ports. This design simplifies debugging, troubleshooting, and secondary development processes.
On-board Computers¶
The H1 robot comes equipped with a “Motion Control Computing Unit” and optionally a “Development Computing Unit” (additional expansion unit available).
Component |
Motion Control Computing Unit (PC 1) |
Development Computing Unit (PC 2, PC 3) |
|---|---|---|
Model |
i5-1235U |
i7-1255U / i7-1265U |
Number of Cores |
10 |
10 |
Number of Threads |
12 |
12 |
Max Turbo Frequency |
4.40 GHz |
4.70 GHz & 4.80 GHz |
Memory |
8GB |
16GB & 32GB |
Memory Type |
LPDDR5 5200 MT/s (dual-channel) |
LPDDR5 5200 MT/s (dual-channel) |
Cache |
12 MB Intel® Smart Cache |
12 MB Intel® Smart Cache |
Storage |
500GB or more |
500GB or more |
Graphics Processing Unit (GPU) |
None |
Intel® Iris® Xe Graphics eligible |
Max Dynamic Frequency of GPU |
1.20 GHz |
1.20 GHz |
Gauss and Neural Accelerator |
3.0 |
3.0 |
Intel® Deep Learning Boost |
Yes |
Yes |
Intel® Adaptix™ Technology |
Yes |
Yes |
Intel® Hyper-Threading Technology |
Yes |
Yes |
Instruction Set |
64-bit |
64-bit |
OpenGL |
4.6 |
4.6 |
OpenCL |
3.0 |
3.0 |
DirectX |
12.1 |
12.1 |
IP Address |
Unaccessible |
192.168.123.162163 |
The “Motion Control Computing Unit” is dedicated to Unitree motion control programs and is not available for external use. Developers can only utilize the “Development Computing Unit” for secondary development. Initial username and password can be obtained by contacting tech support. PC3 “Development Compute Unit” is an optional configuration, with the address being 192.168.123.163. The CPU module may be upgraded to a more advanced version with performance meeting or exceeding the specifications mentioned above.
Lidar¶
The H1 robot’s head incorporates the MID-360 Lidar (IP: 192.168.123.120), which offers superior environmental perception capabilities. Employing omnidirectional, full-angle scanning technology, it delivers real-time and precise environmental data, facilitating accurate recognition and measurement of surrounding objects.
Depth Camera¶
Equipped with the D435i depth camera, the H1 robot’s head boasts exceptional visual perception capabilities. This enables more precise perception and understanding of the surrounding environment, allowing for accurate spatial perception and obstacle detection. Consequently, the robot can interact intelligently with its environment and adapt to various scenarios effectively.
M107 Joint Motor¶
The H1 robot utilizes the self-developed M107 joint motor by Unitree, known for its outstanding performance. Featuring a maximum torque of 360N.m and a maximum tension of 10000N (under equivalent conditions of a 3.5cm force arm), this motor’s hollow axle design makes it lightweight and compact. Additionally, equipped with dual encoders, it provides more accurate position and velocity feedback, meeting the requirements of high-precision control.